
박민혀기
Vision_Kart 1.0V 본문
※find_angle() 함수 각도 값 수정 필요
마지막 포스팅을 찾아보니 OpenCV 환경에서 라이다 데이터 값을 Dotting까지 했다.
(중간중간 3~4번 정도 더 해야 했어야 하는데 미뤄졌다..)
지난주 미팅에서 이 정도면 프로토 타입 정도 된다는 얘기를 듣고 거기서 조금? 더 업데이트된 이번 포스팅에서 소개할 기능을 Vision_Kart 1.0v으로 지정하게 됐다.
Lidar with OpenCV를 시작한지 한 달이 지났다. (Start from 2024-02-30)위에서 말한 대로 꽤 많이 진행됐다.물론 비전 파트가 남아있긴 하지만.. 라이다만 보면 크게는 필더링, 안정화만 남은 것 같다.
Vision_Kart 1.0v
Environment of Vision_Kart
Processor : RaspberryPi 4
OS : Raspbian
Lidar : YDLidar G2
Lidar Frequency : 12Hz
Function of Vision_Kart 1.0v
- Lidar viewer
- Sight angle variable
- Filtering for object tracking
- Object(target) tracking
- Show target angle & distance
- Adaptive circle size for proportion distance(possible any color)
Vision_Kart 1.0v Testing
1. Adaptive circle size for proportion distance
Figure 1은 거리 비례로 색 & Dotting 사이즈를 조절한 결과이다.
사실 색은 내가 알아보기 편하게 하기 위해 한 것이고 큰 의미는 없다..
거리 비례로 Dotting 사이즈를 조절해야 멀리 있는 물체도 하나의 객체로 인식하고, 가까이 있는 물체가 너무 큰 객체로 인식되는 문제를 해결할 수 있다.
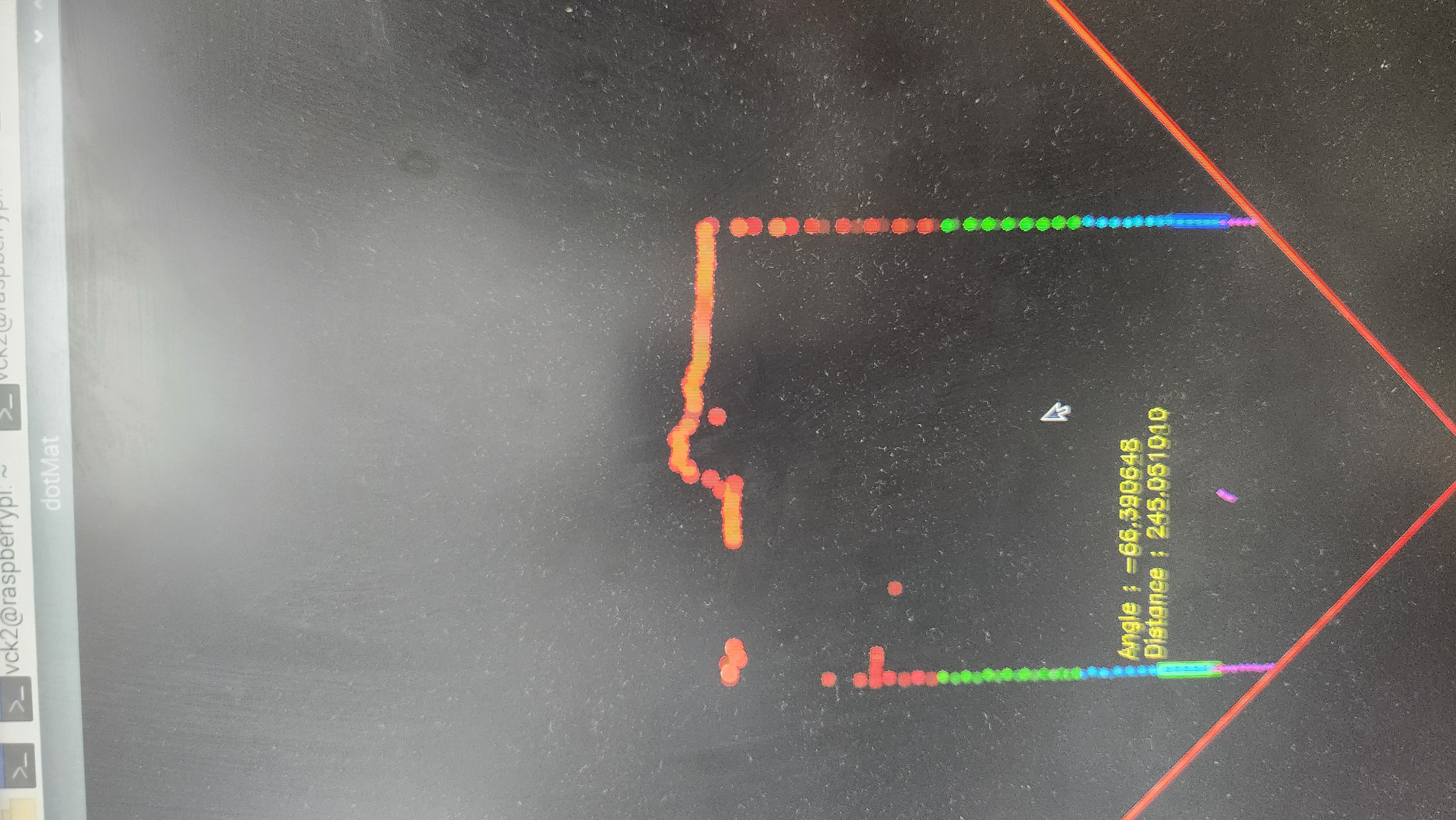
2. Targeting with target angle, distance, size
Figure 2는 현재는 적용되지 않았지만 문제가 발생한 화면이다.
아래 실행 프로그램에서는 단순히 거리를 가지고 판단하는 것이다.
그 결과 파란색 테두리에 있는 객체가 목표물인데 영상처리에서는 초록색 테두리 객체를 잡고있다. (이런 상황은 내가 테스트 중에 가장 많이 일어났던 오류이다.)
이를 해결하기 위해 여러가지 방법을 시도 중인데 가장 유력한 방법 중 하나인 Angle, Distance, Size를 모두 관여하여 필터링 하는 것이다.
위 솔루션은 Vision_Kart 1.1v에 적용 예정이다.

Source Code of Vision_Kart 1.0v
// First YDlidar control with C++
// 2024-02-20
// based from tri_test.cpp
// YDLidar with OpenCV
// 2024-02-22
// Sight Line with OpenCV
// 2024-02-25
// Filter & Draw
// 2024-02-27
// Lidar Tracking
// 2024-02-28
// Show angle & real_distance
// 2024-03-13
// Adaptive circle size for proportion distance(possible any color)
// 2024-03-19
/*****************************/
#include <iostream>
#include <string>
#include "CYdLidar.h"
#include <core/base/timer.h>
#include <core/common/ydlidar_help.h>
#include <cmath>
#include <cstdlib>
#include <opencv2/opencv.hpp>
using namespace std;
using namespace ydlidar;
using namespace cv;
void draw_sight_center(Mat& draw_mat, Point sight_center){
circle(draw_mat, sight_center, 6, Scalar(0, 255, 0), -1);
}
void draw_line(Mat& dotMat, Point sight_center, int Viewer_X, int Viewer_Y, int height){
line(dotMat, sight_center, Point(Viewer_Y, Viewer_X - height), Scalar(0, 0, 255), 3);
line(dotMat, sight_center, Point(0, Viewer_X - height), Scalar(0, 0, 255), 3);
}
Point find_target(Rect target){
return Point(target.x + target.width / 2, target.y + target.height);
}
float find_angle(Point target_point, Point sight_center){
float compute_angle = 0.0;
if(target_point.x != sight_center.x){
Point dis_pt = target_point - sight_center;
float slide_dis = sqrt(pow(dis_pt.x, 2) + pow(dis_pt.y, 2));
compute_angle = abs(dis_pt.y) / slide_dis;
}
else return 0.00;
if(target_point.x > sight_center.x) return acos(compute_angle) * 100;
else return acos(compute_angle) * -100;
}
float find_distance(Point target_point, Point sight_center){
if(target_point.x != sight_center.x){
Point dis_pt = target_point - sight_center;
float slide_dis = sqrt(pow(dis_pt.x, 2) + pow(dis_pt.y, 2));
return slide_dis;
}
else return abs(target_point.y - sight_center.y);
}
//MI : Most Important
//Only Distance
void MI_Size_Tracking(Mat& dotMat, vector<Rect> Signi_Rect, Point sight_center){
vector<int> MIST_List;
vector<float> Signi_Pt;
MIST_List.clear();
Signi_Pt.clear();
if(Signi_Rect.size() > 0){
for(int i = 0; i < Signi_Rect.size(); i++){
Point temp = Point(Signi_Rect[i].x + (Signi_Rect[i].width / 2),
Signi_Rect[i].y + Signi_Rect[i].height);
Point margin_temp = sight_center - temp;
float dis = sqrt(pow(margin_temp.x, 2) + pow(margin_temp.y, 2));
Signi_Pt.push_back(dis);
}
int min_idx = min_element(Signi_Pt.begin(), Signi_Pt.end()) - Signi_Pt.begin();
Point target_center = find_target(Signi_Rect[min_idx]);
string angle_text = "Angle : " + to_string(find_angle(target_center, sight_center));
string distance_text = "Distance : " + to_string(find_distance(target_center, sight_center));
putText(dotMat, angle_text, Point(target_center +
Point(Signi_Rect[min_idx].width, Signi_Rect[min_idx].height * -1 - 20)),
FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 255), true);
putText(dotMat, distance_text, Point(target_center +
Point(Signi_Rect[min_idx].width, Signi_Rect[min_idx].height * -1)),
FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0, 255, 255), true);
rectangle(dotMat, Signi_Rect[min_idx], Scalar(0, 255, 0), 2, -1);
circle(dotMat, target_center, 3, Scalar(0, 0, 255), -1);
}
}
void FilterAndTracking(Mat& dotMat, float circle_area, Point sight_center, Point min_max_area){
Mat gray_dotMat;
vector<vector<Point>> contours;
vector<Vec4i> hierarchy;
cvtColor(dotMat, gray_dotMat, COLOR_BGR2GRAY);
findContours(gray_dotMat, contours, hierarchy, RETR_EXTERNAL, CHAIN_APPROX_SIMPLE);
float dis;
vector<float> dis_vector;
vector<Rect> Signi_Rect;
dis_vector.clear();
Signi_Rect.clear();
for(size_t i = 0; i < contours.size(); i++){
float area = contourArea(contours[i]);
if(area >= circle_area * min_max_area.x && circle_area * min_max_area.y >= area){
Rect boundRect = boundingRect(contours[i]);
Point temp = Point(boundRect.x + (boundRect.width / 2),
boundRect.y + boundRect.height);
Point margin_temp = sight_center - temp;
dis = sqrt(pow(margin_temp.x, 2) + pow(margin_temp.y, 2));
if(300.0 >= dis){
Signi_Rect.push_back(boundRect);
dis_vector.push_back(dis);
rectangle(dotMat, boundRect, Scalar(255,0 ,0), 2);
}
}
}
MI_Size_Tracking(dotMat, Signi_Rect, sight_center);
}
int main(){
string port;
os_init();
map<string, string> ports = lidarPortList();
map<string, string>::iterator it;
if(ports.size() == 1) port = ports.begin()->second;
else{
int id = 0;
for (it = ports.begin(); it != ports.end(); it++)
{
printf("[%d] %s %s\n", id, it->first.c_str(), it->second.c_str());
id++;
}
if(ports.empty()){
cout << "Not Lidar was detected. Please enter the lidar serial port : ";
cin >> port;
}
else{
while(os_isOk()){
cout << "Please select the lidar port : ";
string number;
cin >> number;
if ((size_t)atoi(number.c_str()) >= ports.size())
continue;
it = ports.begin();
id = atoi(number.c_str());
while (id)
{
id--;
it++;
}
port = it->second;
break;
}
}
}
int baudrate = 230400;
cout << "Baudrate : " << baudrate << endl;
bool isSingleChannel = false;
cout << "One-way communication : " << isSingleChannel << endl;
float frequency = 12.0;
cout << "Frequency : " << frequency << "Hz" << endl;
if(!os_isOk()) return -1;
CYdLidar laser;
int optval = TYPE_TRIANGLE;
string ignore_array;
ignore_array.clear();
laser.setlidaropt(LidarPropSerialPort, port.c_str(), port.size());
laser.setlidaropt(LidarPropIgnoreArray, ignore_array.c_str(), ignore_array.size());
laser.setlidaropt(LidarPropSerialBaudrate, &baudrate, sizeof(int));
laser.setlidaropt(LidarPropLidarType, &optval, sizeof(int));
optval = YDLIDAR_TYPE_SERIAL;
laser.setlidaropt(LidarPropDeviceType, &optval, sizeof(int));
optval = 5;
laser.setlidaropt(LidarPropSampleRate, &optval, sizeof(int));
optval = 4;
laser.setlidaropt(LidarPropAbnormalCheckCount, &optval, sizeof(int));
optval = 10;
laser.setlidaropt(LidarPropIntenstiyBit, &optval, sizeof(int));
bool b_optvalue = false;
laser.setlidaropt(LidarPropFixedResolution, &b_optvalue, sizeof(bool));
b_optvalue = false;
laser.setlidaropt(LidarPropReversion, &b_optvalue, sizeof(bool));
b_optvalue = false;
laser.setlidaropt(LidarPropInverted, &b_optvalue, sizeof(bool));
b_optvalue = true;
laser.setlidaropt(LidarPropAutoReconnect, &b_optvalue, sizeof(bool));
laser.setlidaropt(LidarPropSingleChannel, &isSingleChannel, sizeof(bool));
b_optvalue = false;
laser.setlidaropt(LidarPropIntenstiy, &b_optvalue, sizeof(bool));
b_optvalue = true;
laser.setlidaropt(LidarPropSupportMotorDtrCtrl, &b_optvalue, sizeof(bool));
b_optvalue = false;
laser.setlidaropt(LidarPropSupportHeartBeat, &b_optvalue, sizeof(bool));
/// unit: °
float f_optvalue = 180.0f;
laser.setlidaropt(LidarPropMaxAngle, &f_optvalue, sizeof(float));
f_optvalue = -180.0f;
laser.setlidaropt(LidarPropMinAngle, &f_optvalue, sizeof(float));
/// unit: m
f_optvalue = 64.f;
laser.setlidaropt(LidarPropMaxRange, &f_optvalue, sizeof(float));
f_optvalue = 0.05f;
laser.setlidaropt(LidarPropMinRange, &f_optvalue, sizeof(float));
/// unit: Hz
laser.setlidaropt(LidarPropScanFrequency, &frequency, sizeof(float));
laser.enableGlassNoise(false);
laser.enableSunNoise(false);
laser.setBottomPriority(true);
int c = 0;
uint32_t t = getms();
bool ret = laser.initialize();
if(!ret){
cerr << "Fail to initalize " << laser.DescribeError() << endl;
return -1;
}
ret = laser.turnOn();
if(!ret){
cerr << "Fail to start "<< laser.DescribeError() << endl;
return -1;
}
if(ret && os_isOk()){
string userVersion;
if(laser.getUserVersion(userVersion))
cout << "User Version : " << userVersion.c_str() << endl;
}
if(ret){
device_info di;
memset(&di, 0, DEVICEINFOSIZE);
if(laser.getDeviceInfo(di, EPT_Module)) core::common::printfDeviceInfo(di, EPT_Module);
else cout << "Fail to get module device info" << endl;
if(laser.getDeviceInfo(di, EPT_Base)) core::common::printfDeviceInfo(di, EPT_Base);
else cout << "Fail to get baseplate device info" << endl;
}
//OpenCV Property
//Variable at Green//
/* circle_radius => dotting size
min_max_area => borderline
View_Angle => sight angle
*/
/*********************/
int circle_radius = 2;
float circle_area = circle_radius * circle_radius * M_PI;
int Viewer_X = 1000, Viewer_Y = 700;
float View_Angle = 135.0;
float cos_theta = View_Angle - 90.0;
float cos_theta_rad = cos_theta * M_PI / 180.0;
float height = Viewer_Y * tan(acos(View_Angle));
Point sight_center = Point(Viewer_Y / 2, Viewer_X);
Point min_max_area = Point(6, 15);
LaserScan scan;
while(os_isOk()){
if(laser.doProcessSimple(scan)){
Mat dotMat = Mat::zeros(Viewer_Y, Viewer_X, CV_8UC3);
Point center = Point(dotMat.cols, dotMat.rows / 2);
for(size_t i = 0; i < scan.points.size(); i++){
const LaserPoint &p = scan.points.at(i);
float Angle = p.angle * 180.0 / M_PI;
if(Angle >= View_Angle || View_Angle * -1 >= Angle){
float radian_Angle = p.angle;
int dis = p.range * 100;
int x = center.x + static_cast<int>(dis * cos(radian_Angle));
int y = center.y + static_cast<int>(dis * sin(radian_Angle));
int proportion_dis = Viewer_X - x;
if(proportion_dis >= 500)
circle(dotMat, Point(x, y), 6, Scalar(0, 0, 255), -1);
else if(proportion_dis >= 400)
circle(dotMat, Point(x, y), 5, Scalar(0, 0, 175), -1);
else if(proportion_dis >= 300)
circle(dotMat, Point(x, y), 4, Scalar(0, 175, 0), -1);
else if(proportion_dis >= 200)
circle(dotMat, Point(x, y), 3, Scalar(255, 175, 0), -1);
else
circle(dotMat, Point(x, y), 2, Scalar(255, 0, 255), -1);
// circle(dotMat, Point(x, y), circle_radius, Scalar(255, 255, 255), -1);
}
}
transpose(dotMat, dotMat);
flip(dotMat, dotMat, 1);
//Filter & Draw
FilterAndTracking(dotMat, circle_area, sight_center, min_max_area);
//draw angle of sight
float hypotenuse = (Viewer_Y / 2) / cos(cos_theta_rad);
int height = hypotenuse * sin(cos_theta_rad);
draw_line(dotMat, sight_center, Viewer_X, Viewer_Y, height);
draw_sight_center(dotMat, sight_center);
imshow("dotMat", dotMat);
int key = waitKey(10);
if(key == 27) break;
}
else{
cerr << "Failed to get Lidar Data" << endl;
}
if(!c++){
cout << "Time consuming " << getms() - t <<
" from initialization to parsing to point cloud data" << endl;
}
}
laser.turnOff();
laser.disconnecting();
return 0;
}'CELLON Kart(Tracking)' 카테고리의 다른 글
| Before start Vision_Kart 2.xv (0) | 2024.03.25 |
|---|---|
| Vision_Kart 1.1V (0) | 2024.03.23 |
| Vision_Kart MasterPlan2 (0) | 2024.03.19 |
| CELLON Kart HSV 보안 사항 (0) | 2023.07.24 |
| CELLON Kart HSV Tracking(1) (0) | 2023.07.01 |

